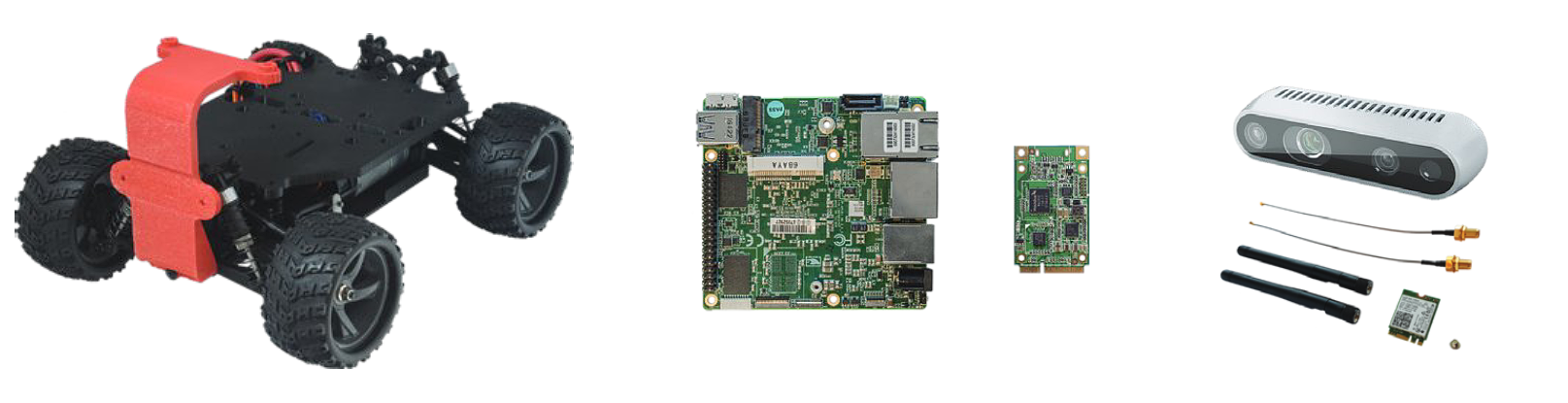


❝ The UP Squared RoboMaker Pro Kit includes vision compute hardware on board.
This enables us to free our CPU for decision making while processing data and building the world model of the robot in an optimized manner, by having production ready boards integrated with Intel® Movidius™ Myriad™ X VPU and an Intel® RealSense™ depth camera enables to jump from low-level control of the robot to a fully autonomous robot with cloud connectivity within days. ❞
This enables us to free our CPU for decision making while processing data and building the world model of the robot in an optimized manner, by having production ready boards integrated with Intel® Movidius™ Myriad™ X VPU and an Intel® RealSense™ depth camera enables to jump from low-level control of the robot to a fully autonomous robot with cloud connectivity within days. ❞

Dr. Yehuda Elmaliah
CEO of Cogniteam